 되돌아오다
되돌아오다 스마트 비지니스
스마트 비지니스 스마트 시티
스마트 시티 스마트 라이프
스마트 라이프 스마트 오토
스마트 오토- 핵심기술
- 원천 기술 체계를 토대로, SenseCore AI 대형 디바이스를 핵심 기반으로 하여 여러 분야, 다방면의 첨단 연구를 추진하고 각각의 수직적 시나리오에서 AI의 활용을 신속하게 연결하여 업계에 권한을 부여합니다.
- 01비전 인지 기술
- 02라이더 감지 기술
- 03멀티 센서 통합 기술
- 04차량/행인/비동력 차량의 동작 예측
- 05의사결정 프로그래밍과 제어 기술
- 06고정밀도 지도의 구축 및 위치 추적
- 07다중칩 플랫폼 적응 및 배포
- 08카메라 적응 기술
- 09품질 관리 체계
01 / 09
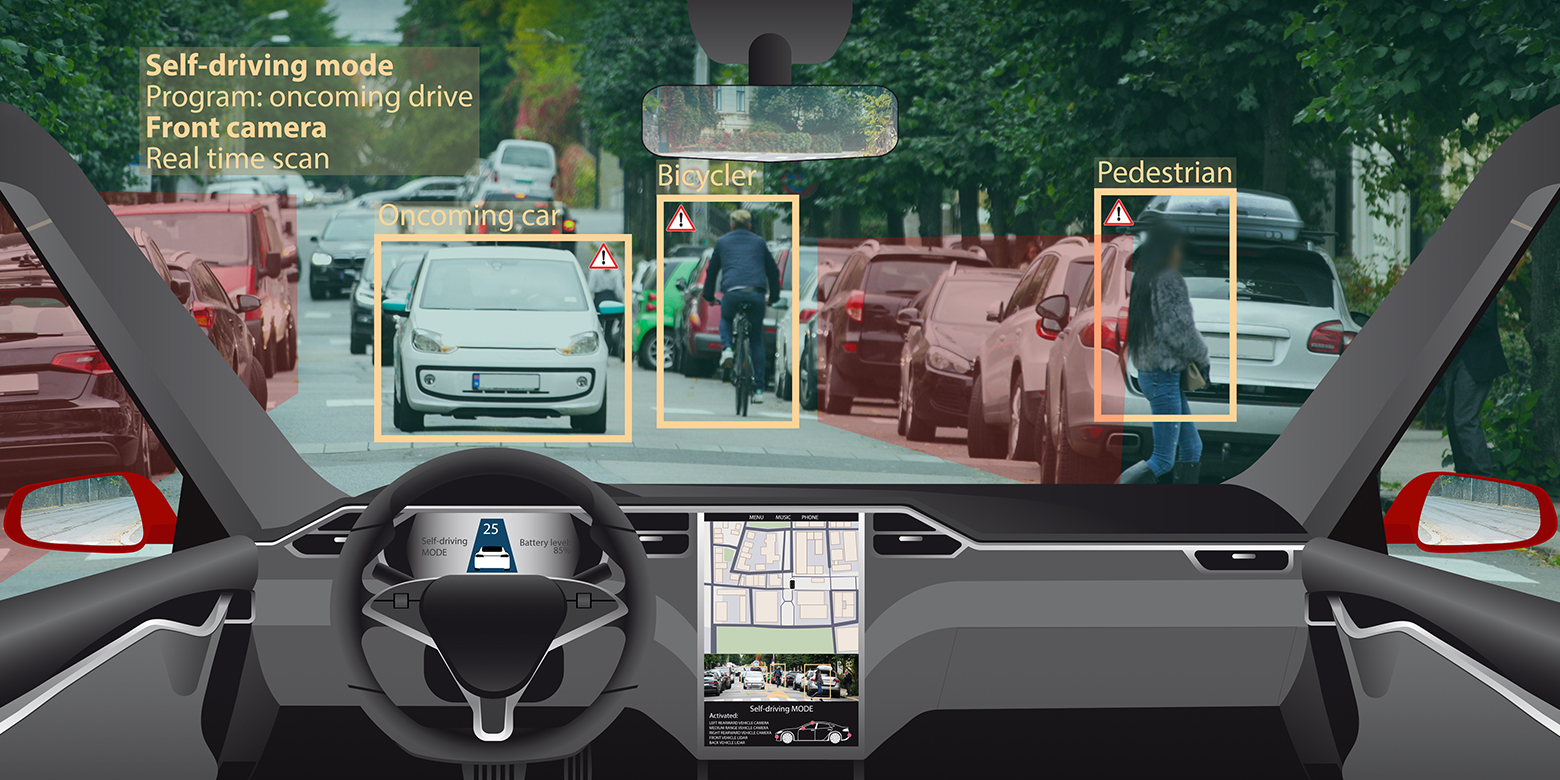
비전 인지 기술
센스타임의 컴퓨터 비전 분야에서 축적된 기술로, 하나의 싱글렌즈 카메라를 통해 차선과 길 가장자리, 운행 가능 구역, 차량, 행인, 교통 표지 및 신호등 등의 정보를 정확하게 식별할 수 있습니다. 한편 고성능, 경량화 목표물 탐지, 추적, 식별 기술을 알고리즘의 핵심으로 하여 운전자 분석 시스템과 차내 감지 시스템 및 안면 인식 차문 열기 제품을 구현할 수 있으며 암광/역광 등의 복잡한 광원 시나리오를 처리할 수 있습니다.

02 / 09
라이더 감지 기술
다양한 라이더 모델과 응용 시나리오의 감지 알고리즘을 지원하며, 교통 참가자와 미지의 목표물을 정확하게 탐지, 추적할 수 있어 자율주행과 차량-인프라 협력 등의 시나리오에 적용할 수 있습니다.

03 / 09
멀티 센서 통합 기술
다양한 멀티 센서 데이터들을 자유롭게 조합할 수 있어, 시스템에 지연 시간이 적고 정밀도가 높고, 고장 허용 한계가 있는 감지 결과를 제공합니다.

04 / 09
차량/행인/비동력 차량의 동작 예측
차량의 차선 변경, 커브 돌기, 행인/비동력 차량이 이 차에 주의를 기울이는지, 무단 횡단 의도가 있는지 등에 대해 정확하게 식별, 판단하고 향후 발생 가능한 여러 주행 궤적을 예측하며, 더욱 지능적인 자율 주행 의사결정 프로그래밍을 위해 확실한 근거를 제공할 수 있습니다.
05 / 09
의사결정 프로그래밍과 제어 기술
다수의 모듈과 현재 주행 상태, 환경 등 정보를 취합하여 복잡한 시나리오에서 안전하고 스마트하며 편안한 의사결정 프로그래밍 및 정확한 차량 제어 기능을 구현합니다.

06 / 09
고정밀도 지도의 구축 및 위치 추적
멀티센서 융합 기술을 기반으로 도시급 고정밀도 3차원 지도의 구축을 구현하고 포인트 클라우드 계층, 위치 추적 계층, 의미론적 계층 및 내비게이션 계층 등 여러 가지 계층을 지원합니다. 그리고 고정밀도 지도를 기반으로 온라인 실시간 고정밀도 위치 추적을 제공합니다.

07 / 09
다중칩 플랫폼 적응 및 배포
센스타임의 원천 기술인 AI 훈련 플랫폼 SenseParrots를 기반으로, 자체 개발한 FPGA 빠른 배포 툴체인 및 하드웨어 가속기는 알고리즘이 유연하고 여러 가지 주류 SoC 칩에 쉽게 배포할 수 있으며 빠른 양산을 위한 자율주행 기술을 추진합니다. 자체 개발한 HPC 및 에지 컴퓨팅 배포 프레임을 통해, 차량 탑재 칩의 주류 ECU에 대해 AI 칩 (NPU/DSP/GPU) 의 연산 능력을 충분히 발휘하여 낮은 지연율, 낮은 CPU점유율, 낮은 메모리 사용량의 제품 성능을 구현합니다.
08 / 09
카메라 적응 기술
성능 최적화 시장 주류 캐빈 종류의 비전 카메라(IR/RGB/RGB-IR)에 적응하고 이에 맞추어, 카메라 영상화 품질의 지표에 대한 계량화 요건을 형성하여 체계적으로 제품의 일치성을 보장합니다.

09 / 09
품질 관리 체계
완전한 품질 관리 체계를 구축하였으며, 2020년 2월에 ISO26262 ASIL-B 기능 안전성 증서를 획득하고 2020년 7월 ASPICE L2 증서를 획득하였습니다.

01 / 09
비전 인지 기술
센스타임의 컴퓨터 비전 분야에서 축적된 기술로, 하나의 싱글렌즈 카메라를 통해 차선과 길 가장자리, 운행 가능 구역, 차량, 행인, 교통 표지 및 신호등 등의 정보를 정확하게 식별할 수 있습니다. 한편 고성능, 경량화 목표물 탐지, 추적, 식별 기술을 알고리즘의 핵심으로 하여 운전자 분석 시스템과 차내 감지 시스템 및 안면 인식 차문 열기 제품을 구현할 수 있으며 암광/역광 등의 복잡한 광원 시나리오를 처리할 수 있습니다.
02 / 09
라이더 감지 기술
다양한 라이더 모델과 응용 시나리오의 감지 알고리즘을 지원하며, 교통 참가자와 미지의 목표물을 정확하게 탐지, 추적할 수 있어 자율주행과 차량-인프라 협력 등의 시나리오에 적용할 수 있습니다.
03 / 09
멀티 센서 통합 기술
다양한 멀티 센서 데이터들을 자유롭게 조합할 수 있어, 시스템에 지연 시간이 적고 정밀도가 높고, 고장 허용 한계가 있는 감지 결과를 제공합니다.
04 / 09
차량/행인/비동력 차량의 동작 예측
차량의 차선 변경, 커브 돌기, 행인/비동력 차량이 이 차에 주의를 기울이는지, 무단 횡단 의도가 있는지 등에 대해 정확하게 식별, 판단하고 향후 발생 가능한 여러 주행 궤적을 예측하며, 더욱 지능적인 자율 주행 의사결정 프로그래밍을 위해 확실한 근거를 제공할 수 있습니다.
05 / 09
의사결정 프로그래밍과 제어 기술
다수의 모듈과 현재 주행 상태, 환경 등 정보를 취합하여 복잡한 시나리오에서 안전하고 스마트하며 편안한 의사결정 프로그래밍 및 정확한 차량 제어 기능을 구현합니다.
06 / 09
고정밀도 지도의 구축 및 위치 추적
멀티센서 융합 기술을 기반으로 도시급 고정밀도 3차원 지도의 구축을 구현하고 포인트 클라우드 계층, 위치 추적 계층, 의미론적 계층 및 내비게이션 계층 등 여러 가지 계층을 지원합니다. 그리고 고정밀도 지도를 기반으로 온라인 실시간 고정밀도 위치 추적을 제공합니다.
07 / 09
다중칩 플랫폼 적응 및 배포
센스타임의 원천 기술인 AI 훈련 플랫폼 SenseParrots를 기반으로, 자체 개발한 FPGA 빠른 배포 툴체인 및 하드웨어 가속기는 알고리즘이 유연하고 여러 가지 주류 SoC 칩에 쉽게 배포할 수 있으며 빠른 양산을 위한 자율주행 기술을 추진합니다. 자체 개발한 HPC 및 에지 컴퓨팅 배포 프레임을 통해, 차량 탑재 칩의 주류 ECU에 대해 AI 칩 (NPU/DSP/GPU) 의 연산 능력을 충분히 발휘하여 낮은 지연율, 낮은 CPU점유율, 낮은 메모리 사용량의 제품 성능을 구현합니다.
08 / 09
카메라 적응 기술
성능 최적화 시장 주류 캐빈 종류의 비전 카메라(IR/RGB/RGB-IR)에 적응하고 이에 맞추어, 카메라 영상화 품질의 지표에 대한 계량화 요건을 형성하여 체계적으로 제품의 일치성을 보장합니다.
09 / 09
품질 관리 체계
완전한 품질 관리 체계를 구축하였으며, 2020년 2월에 ISO26262 ASIL-B 기능 안전성 증서를 획득하고 2020년 7월 ASPICE L2 증서를 획득하였습니다.


