 되돌아오다
되돌아오다 스마트 비지니스
스마트 비지니스 스마트 시티
스마트 시티 스마트 라이프
스마트 라이프 스마트 오토
스마트 오토- 핵심기술
- 원천 기술 체계를 토대로, SenseCore AI 대형 디바이스를 핵심 기반으로 하여 여러 분야, 다방면의 첨단 연구를 추진하고 각각의 수직적 시나리오에서 AI의 활용을 신속하게 연결하여 업계에 권한을 부여합니다.
- 01크로스 플랫폼 경량급 AR/VR 엔진
- 02광원 추정
- 03실시간 고밀도 3D 재구성
- 04운동회복 구조(SfM)
- 05위치 추적 및 지도 구축(SLAM)
- 062D / 3D 객체의 식별 및 추적
01 / 06
크로스 플랫폼 경량급 AR/VR 엔진
멀티플랫폼을 지원하고, 작은 부피, 다양한 광원 및 재질 모델을 지원하며, 더미 객체 쉴드와 음영 투사, 아바타 표정 구동 등을 지원합니다.

02 / 06
광원 추정
이미지에서 리얼 시나리오의 광원 환경을 추정하여 더미 객체의 실사 렌더링에 사용할 수 있습니다.

03 / 06
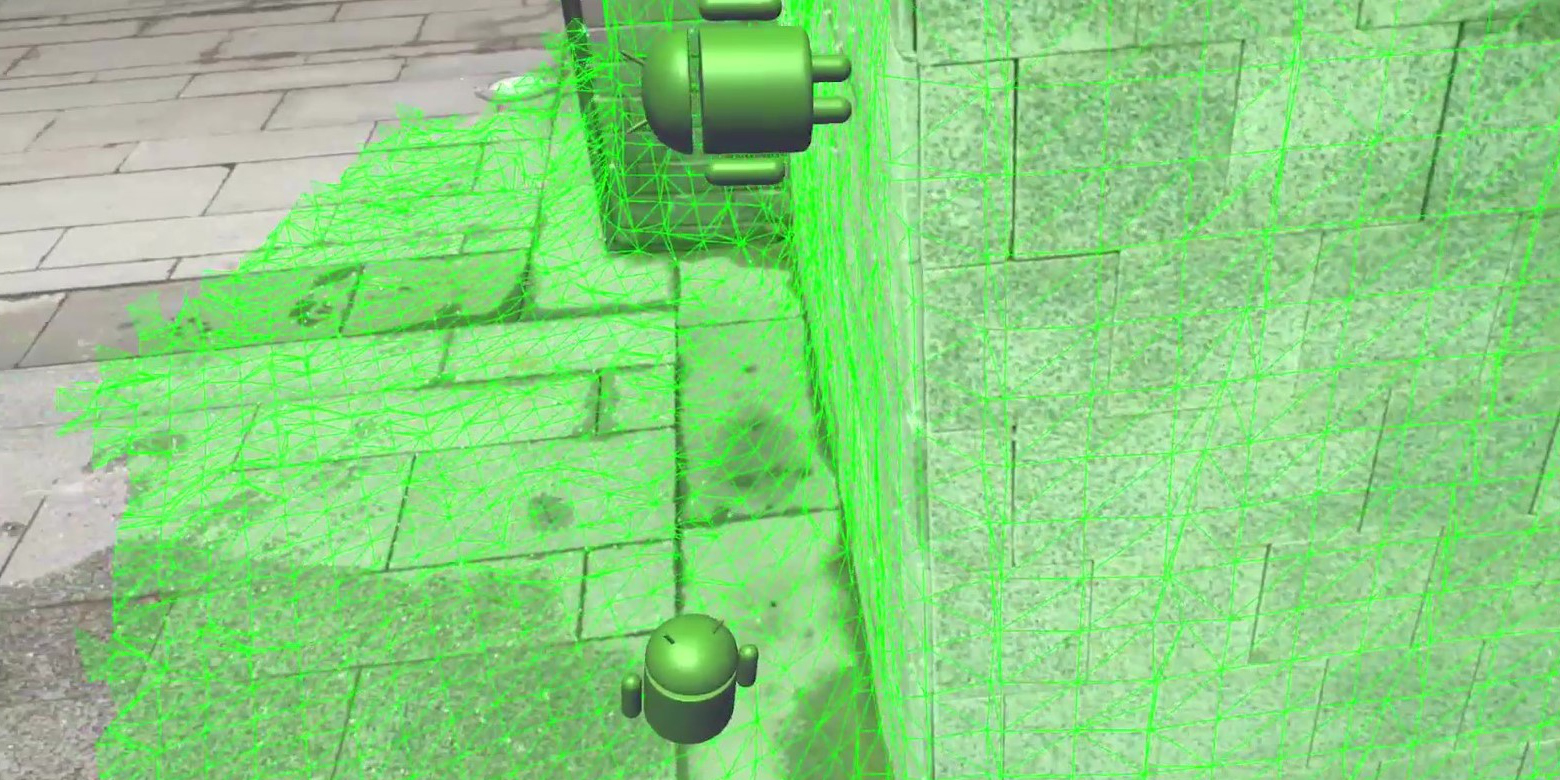
실시간 고밀도 3D 재구성
자연 시나리오의 고밀도 3D 모델의 온라인 복원을 구현하고 모바일 장치에서 실시간 시나리오 가상 3D 디지털화, 실사 렌더링, 음영 합성 등 현실-가상 융합 효과 및 더미 객체의 쉴드와 충돌 등 인터랙트브 효과를 지원하며, 물리적으로 진실한 “실제-가상 융합” 세계를 창조합니다.
04 / 06
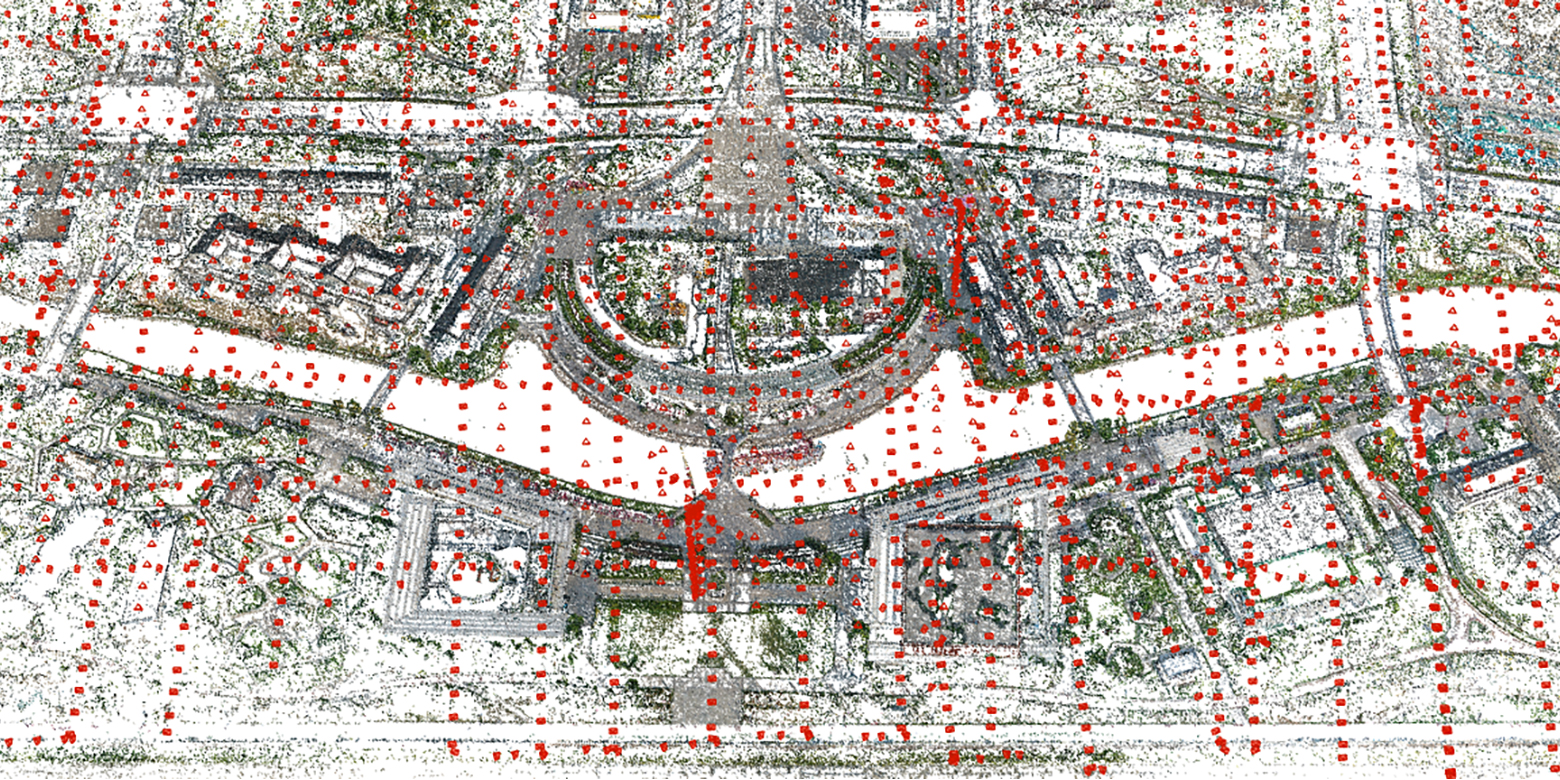
운동회복 구조(SfM)
대량 이미지 또는 동영상 시퀀스의 카메라 모션 파라미터 및 시나리오 3D 구조의 회복을 지원하며, 사진 전송 및 3D 로밍 등 응용을 구현할 수 있습니다.
05 / 06
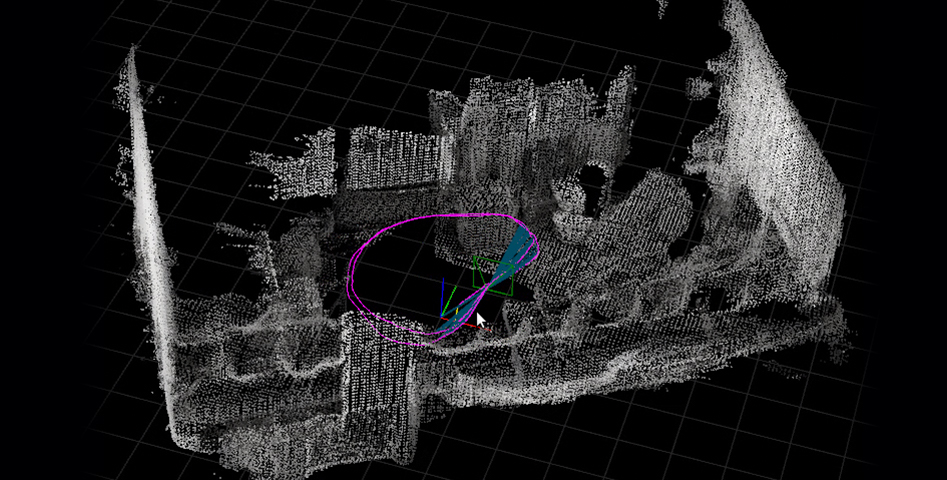
위치 추적 및 지도 구축(SLAM)
자체 개발한 시각 관성 SLAM 시스템을 통해 장비의 3D 공간 위치를 실시간 추적할 수 있습니다. 동시에, 시나리오의 3D 기하학 지도를 구축하고, 모바일 플랫폼의 실시간 위치 추적과 더미 객체 삽입을 지원하여 완벽한 ‘현실-가상의 융합’ 효과를 얻을 수 있습니다.
06 / 06
2D / 3D 객체의 식별 및 추적
업계에서 앞선 이미지 식별 및 추적 기술에 기반하여 시나리오 속의 2D / 3D 객체를 신속하게 식별하고 안정적인 추적을 진행할 수 있습니다.

01 / 06
크로스 플랫폼 경량급 AR/VR 엔진
멀티플랫폼을 지원하고, 작은 부피, 다양한 광원 및 재질 모델을 지원하며, 더미 객체 쉴드와 음영 투사, 아바타 표정 구동 등을 지원합니다.
02 / 06
광원 추정
이미지에서 리얼 시나리오의 광원 환경을 추정하여 더미 객체의 실사 렌더링에 사용할 수 있습니다.
03 / 06
실시간 고밀도 3D 재구성
자연 시나리오의 고밀도 3D 모델의 온라인 복원을 구현하고 모바일 장치에서 실시간 시나리오 가상 3D 디지털화, 실사 렌더링, 음영 합성 등 현실-가상 융합 효과 및 더미 객체의 쉴드와 충돌 등 인터랙트브 효과를 지원하며, 물리적으로 진실한 “실제-가상 융합” 세계를 창조합니다.
04 / 06
운동회복 구조(SfM)
대량 이미지 또는 동영상 시퀀스의 카메라 모션 파라미터 및 시나리오 3D 구조의 회복을 지원하며, 사진 전송 및 3D 로밍 등 응용을 구현할 수 있습니다.
05 / 06
위치 추적 및 지도 구축(SLAM)
자체 개발한 시각 관성 SLAM 시스템을 통해 장비의 3D 공간 위치를 실시간 추적할 수 있습니다. 동시에, 시나리오의 3D 기하학 지도를 구축하고, 모바일 플랫폼의 실시간 위치 추적과 더미 객체 삽입을 지원하여 완벽한 ‘현실-가상의 융합’ 효과를 얻을 수 있습니다.
06 / 06
2D / 3D 객체의 식별 및 추적
업계에서 앞선 이미지 식별 및 추적 기술에 기반하여 시나리오 속의 2D / 3D 객체를 신속하게 식별하고 안정적인 추적을 진행할 수 있습니다.


