




 Return
Return- Core Technology
- Based on the foundation of proprietary technologies and SenseCore AI infrastructure,
SenseTime has rapidly opened up AI application in multiple vertical scenarios, and is empowering various industries.
- 01Lightweight Cross-Platform AR/VR Engine
- 02Lighting Estimation
- 03Real-Time Dense 3D Reconstruction
- 04Structure from Motion (SfM)
- 05Simultaneous Localization and Mapping (SLAM)
- 06Flat/3D Object Recognition and Tracking
01 / 06
Lightweight Cross-Platform AR/VR Engine
The lightweight cross-platform AR/VR engine supports multiple platforms, lighting and material models, virtual object sheltering and shadow projection to enable various expression-driven facial animations of avatars.

02 / 06
Lighting Estimation
The lighting estimation subsystem predicts the lighting condition of the scene for realistic rendering of the virtual objects.

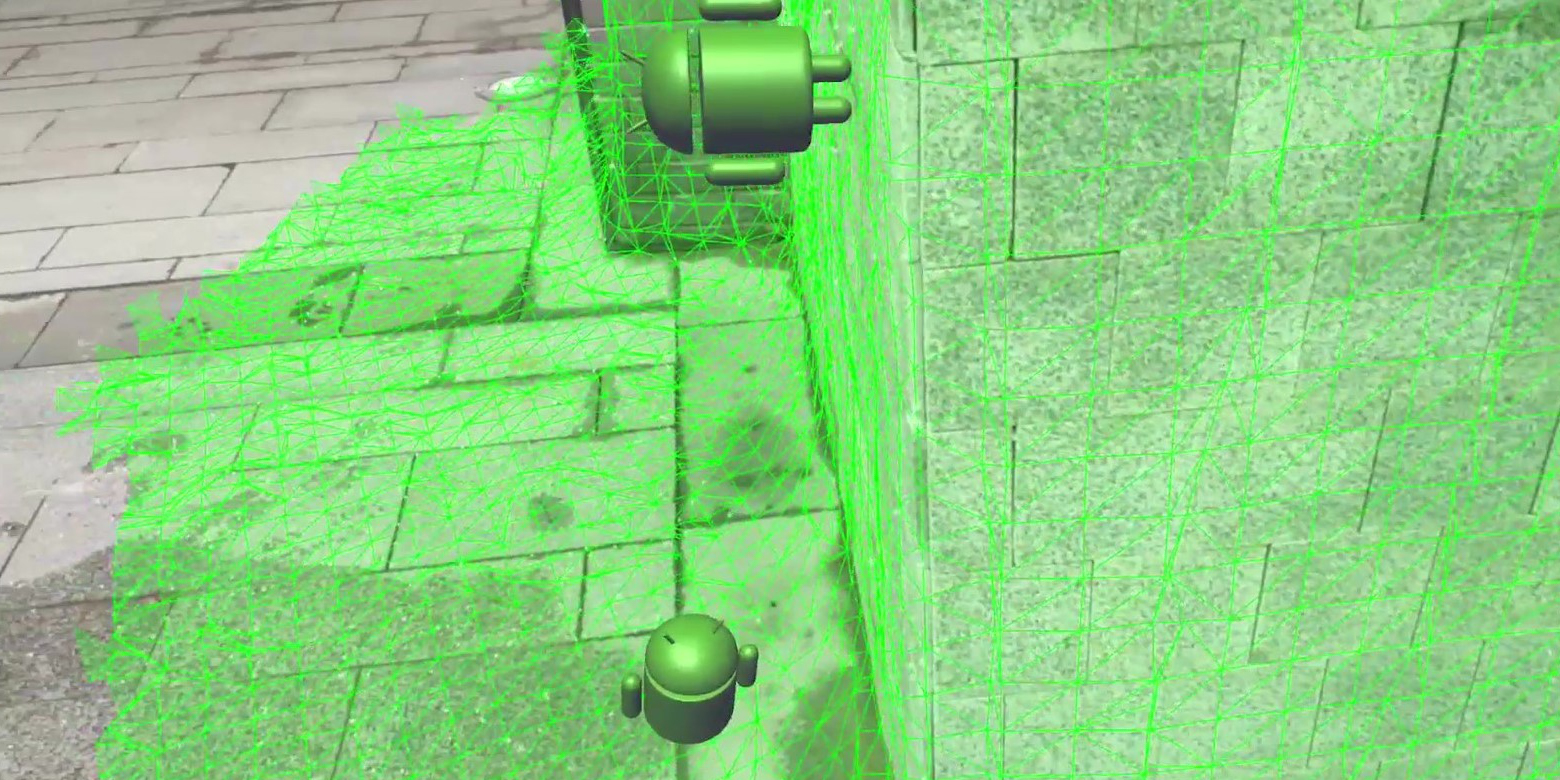
03 / 06
Real-Time Dense 3D Reconstruction
Completing dense 3D reconstruction of natural scenes online, the platform supports real-time virtual 3D scene digitization, realistic rendering, shadow carving, and other integration effects on mobile devices, including sheltering and collision effects, perfectly realizing virtual reality.
04 / 06
Structure from Motion (SfM)
The structure from motion (SFM) system is capable of conducting camera motion recovery and 3D object reconstruction for a sequence of massive images and videos, making it ideal for photo tourism and 3D roaming deployment.
.jpeg)
05 / 06
Simultaneous Localization and Mapping (SLAM)
The self-developed, industry-leading visual inertial navigation SLAM system offers real-time 3D object pose estimation and real-time object tracking while simultaneously constructing a 3D geometric map of the scene online. SLAM supports real-time positioning and virtual object integration in real scenes on mobile platforms, achieving a perfect integration of virtuality and reality.
.jpeg)
06 / 06
Flat/3D Object Recognition and Tracking
The advanced flat/3D object recognition and tracking system quickly identify flat and 3D objects to provide stable real-time object tracking.

01 / 06
Lightweight Cross-Platform AR/VR Engine
The lightweight cross-platform AR/VR engine supports multiple platforms, lighting and material models, virtual object sheltering and shadow projection to enable various expression-driven facial animations of avatars.
02 / 06
Lighting Estimation
The lighting estimation subsystem predicts the lighting condition of the scene for realistic rendering of the virtual objects.
03 / 06
Real-Time Dense 3D Reconstruction
Completing dense 3D reconstruction of natural scenes online, the platform supports real-time virtual 3D scene digitization, realistic rendering, shadow carving, and other integration effects on mobile devices, including sheltering and collision effects, perfectly realizing virtual reality.
04 / 06
Structure from Motion (SfM)
The structure from motion (SFM) system is capable of conducting camera motion recovery and 3D object reconstruction for a sequence of massive images and videos, making it ideal for photo tourism and 3D roaming deployment.
05 / 06
Simultaneous Localization and Mapping (SLAM)
The self-developed, industry-leading visual inertial navigation SLAM system offers real-time 3D object pose estimation and real-time object tracking while simultaneously constructing a 3D geometric map of the scene online. SLAM supports real-time positioning and virtual object integration in real scenes on mobile platforms, achieving a perfect integration of virtuality and reality.
06 / 06
Flat/3D Object Recognition and Tracking
The advanced flat/3D object recognition and tracking system quickly identify flat and 3D objects to provide stable real-time object tracking.


